| What is Operant and what is Classical?
Ambulatory organisms are faced with the task of surviving
in a rapidly changing environment. As a consequence, they have acquired
the ability to learn about the nature of that environment and how to
behave in it. Both, learning about relations in the "world" around (classical
or Pavlovian conditioning) and about the consequences of one's own
actions in that world (operant or instrumental
conditioning) contribute to this task.
Both operant and classical conditioning can be conceptualized as detection and memorization of temporal relationships. Moreover, organisms are usually faced with three term contingencies of their own behavior, one or several initially neutral stimuli (i.e. conditioned stimuli, CS) and an inherently significant stimulus (i.e. the reinforcer or the unconditioned stimulus, US). Consequently, most learning situations comprise both operant and classical components and more often than not it is impossible to discern the associations the animal has produced when it shows the learned behavior. Therefore, a recurrent concern in learning and memory research on the behavioral level has been the question whether for operant and classical conditioning a common formalism can be derived or whether they constitute two basically different processes. The use of learning experiments that employ intertwined situations in which a clear distinction between operant and classical components is impossible has hampered the investigation of this question for decades. The Drosophila flight simulator, for the first time, provides the necessary experimental rigor to approach this task successfully.
In the flight simulator, the experimenter can establish all possible contingencies between the flies behavior (yaw torque), initially neutral CS's (patterns or colors) and the reinforcer (heat):
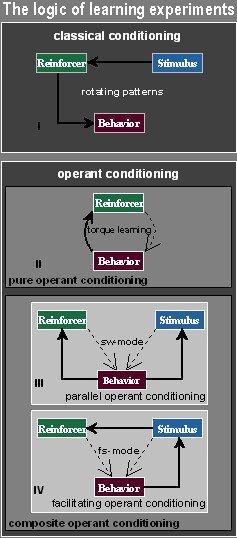
Figure: The logic of learning experiments. At least four basic learning set-ups can be thought of when a behavior is to be conditioned in relation to either one or more stimuli (click on the respective diagram or see text for detailed descriptions).
Solid arrows - feed-forward relation; dotted arrows - feed-back relation. |
Simple associative learning experiments are usually classified into classical and operant conditioning situations (see above). Drosophila can be classically conditioned to avoid certain flight directions with respect to a set of landmarks as described in the flight simulator set-up (I). Operant conditioning experiments can be designed as either 'pure' or 'composite'. 'Pure' operant conditioning is a situation in which only the animal's behavior controls and is modified by, a biologically significant stimulus (reinforcer). No other sensory stimuli are contingent upon the presentation of the reinforcer and no sensory feedback besides the reinforcer is delivered to the animal about its behavior. Yaw torque motor learning at the Drosophila flight simulator is an example of this type (II). In 'composite' operant conditioning the animal is faced with a three term contingency consisting of its own behavior, the reinforcer and a sensory stimulus.
Composite operant conditioning can be further subdivided:
(a) Situations in which the CS is only paralleling the appearance of the US, i.e. the change in a behavioral program primarily determines reinforcer presentation. In the switch mode at the flight simulator a CS parallels the appearance of the US during a 'pure' operant conditioning process (yaw torque learning, II) and the CS/US association forms in parallel to the concomitant motor program modulation. The fly learns to avoid the heat by restricting its yaw torque range and at the same time the heat induces the pattern or color preference. We can thus refer to situations like this as 'parallel' operant conditioning (III).
(b) Situations in which the behavior controls the CS onto which the
US is made contingent; i.e. there is no a priori contingency between
a behavioral program and the reinforcer as in (a). No 'pure' operant
conditioning occurs but the operant process facilitates the CS/US transfer.
This happens in flight simulator operant pattern
learning, as is described in my diploma
thesis and in the document describing the replay and the transfer
experiments (see my overview document).
We suggest to call this type of situations 'facilitating' operant conditioning
(IV).
Within this new framework, I conduct my research which is presented together with more background information in my overview document 'Fly Psychology?'.
All content on brembs.net is copyright
© Björn Brembs.
|